Developer Portal Community
- Top Results
- Community
- Nexeed Automation
- Technology packs and Assist functions
- integrated robotics - Brake release mode expected error
We are still working on migrating to the new Bosch Connected Industry Online Portal. Stay tuned! Click here for the latest updates.
integrated robotics - Brake release mode expected error
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2023 02:57 AM
Hello,
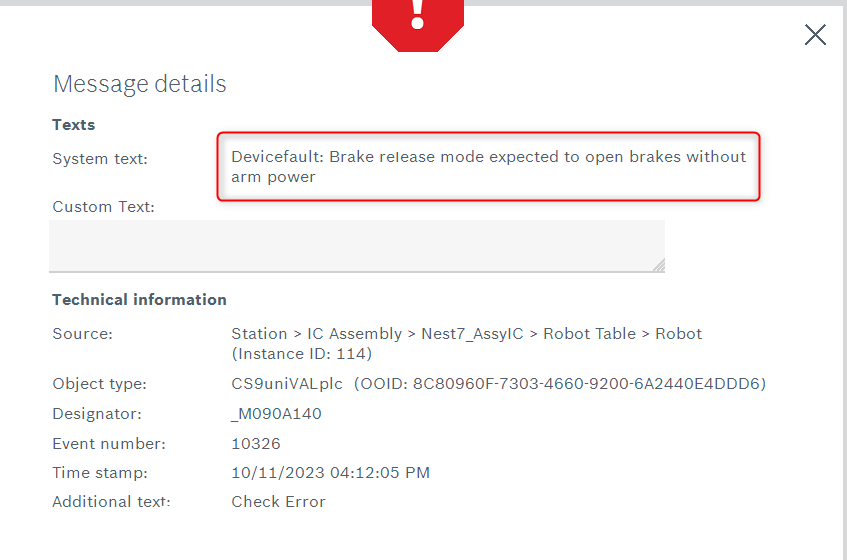
One issue encountered during commissioning, A alarm 'Brake release mode expected to open the brakes without arm power' is occurred from time to time, I am not sure why the error is popped up and what the meaning is, I did not design any brake' code and activate brake test function from the Staubli controller. the following are cases:
1.machine is running and robot is in the hlep position to wait part. but suddenly this alarm came out.
2.execute a manaul sequence to move the robot from a nest to a help position in Z direction, but sddenly this alarm came out during moving
thank you
Solved! Go to Solution.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2023 10:31 AM
Hello,
This sounds pretty strange.
Can you please check the following things:
- Check if the Firmware of the Robot (univalPlcServer) is the same as tested with the Robot Peripheral (see documentation).
- Activate the logging of the robot (status view of the robot unit) and wait for the error. If it appears, please post the logfile here or send it to the helpdesk.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2023 11:09 AM
Based on the error number (>10000), it is an error that comes directly from the robot control
and is only displayed by the PLC.
I’m pretty sure that’s a problem on the Stäubli side...
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-13-2023 07:53 AM
thank you for your quick response~
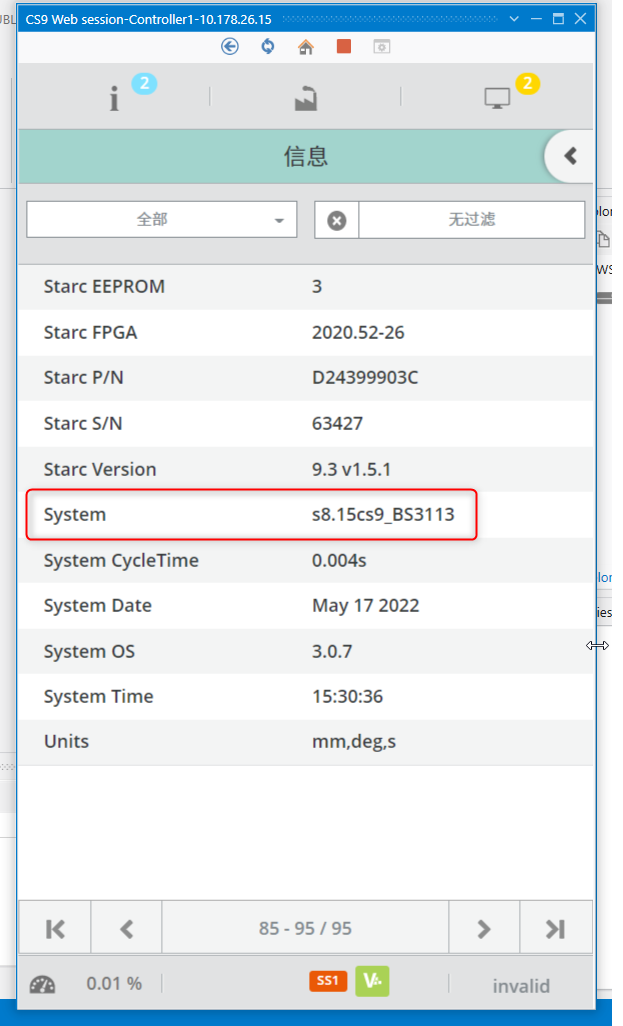
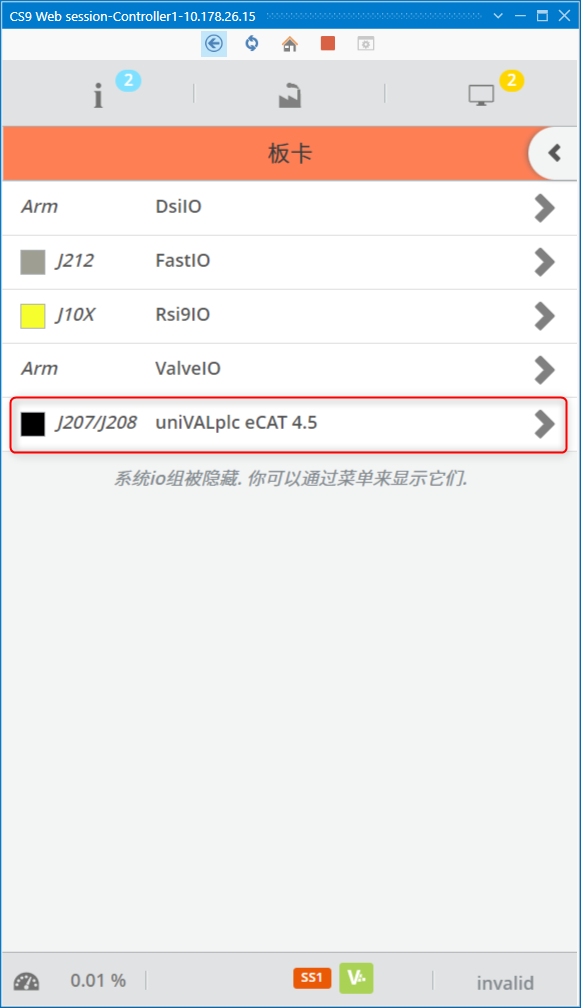
I just checked the version via SRS software of Staubli, system version is S8.15 and eCAT is 4.5, but cannot find the uniVALplc server version, just only find a license enable information. about the uniVALplc client, I got the software from Staubli-CN and installed uniVALplc_s4.6.
I used the robotics object version is 1.5.5, and checked the document, can only find the tested/support version, s8.10 and v4.5
Here I also put the log file of robot, please check~ thank you
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-19-2023 08:20 AM
Please take a look on the "Overview" view of the robot object - there should the software version of the stäubli be displayed.
It doesn’t matter if you use UniValPLC 4.5 or UniValPLC 4.6 - both are supported.
Important is, that the UniValPlc-Client version ( PLC side ) matches the UniValPlc-Server version ( Stäubli side ).
Via the STD update dialog in CpStudio you can select the UniValPlc-Client version.
(The different NexeedStaubliUniValPlc versions must be located in you STD\Peripherals folder )
So far so good - but from my point of view, you are still looking on the wrong side...
As i already said, this error is genereted by the stäubli robot and the plc only displays this error message.
You send us the log-file from the programmable robot object - but not the log of the stäubli robot itself...
Please take a look on the Stäubli teach panel and check the log messages there...
Still looking for something?
- Top Results