Developer Portal Community
- Top Results
- Community
- Nexeed Automation
- Technology packs and Assist functions
- integrated robotics coordinate is not match
We are moving! We are currently migrating our community to the new Bosch Connected Industry Online Portal. The community will be available latest in the new year again, until then it will be in read-only mode. Click here for more information.
integrated robotics coordinate is not match
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-18-2023 02:50 AM
Hello,
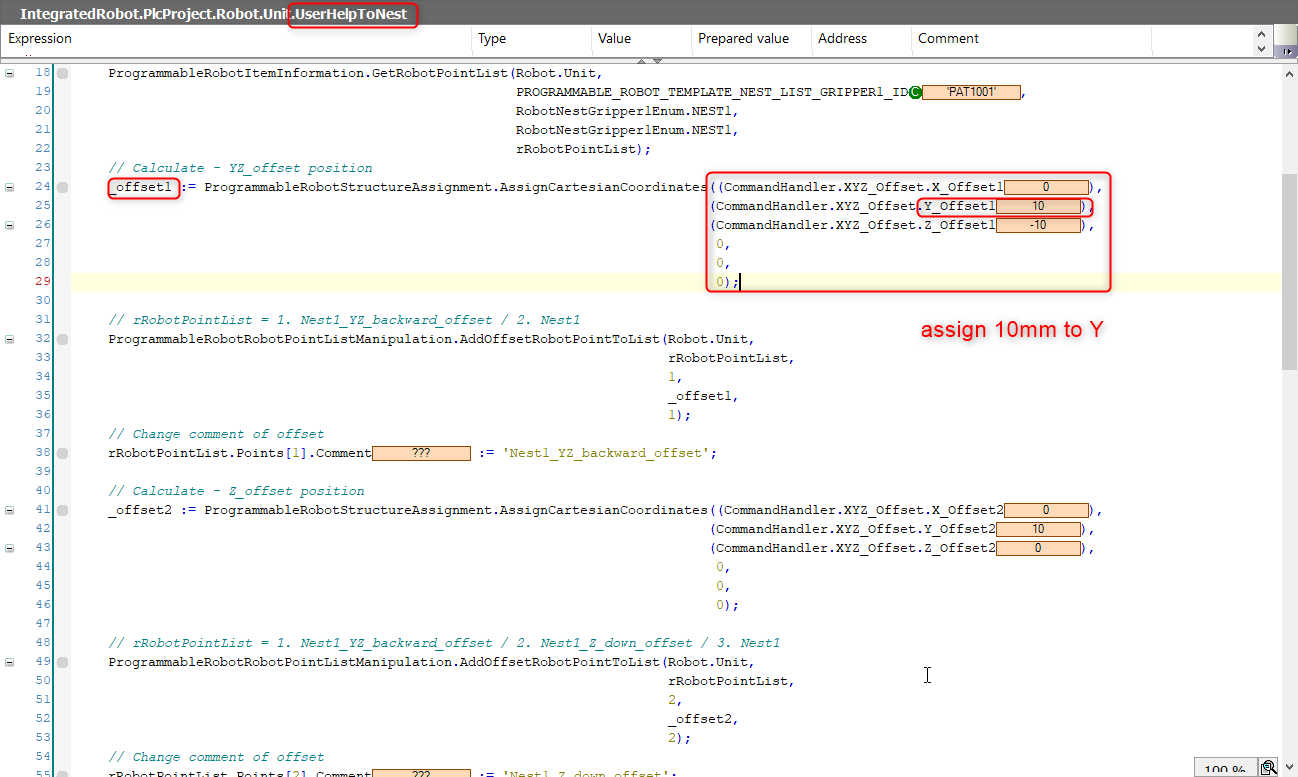
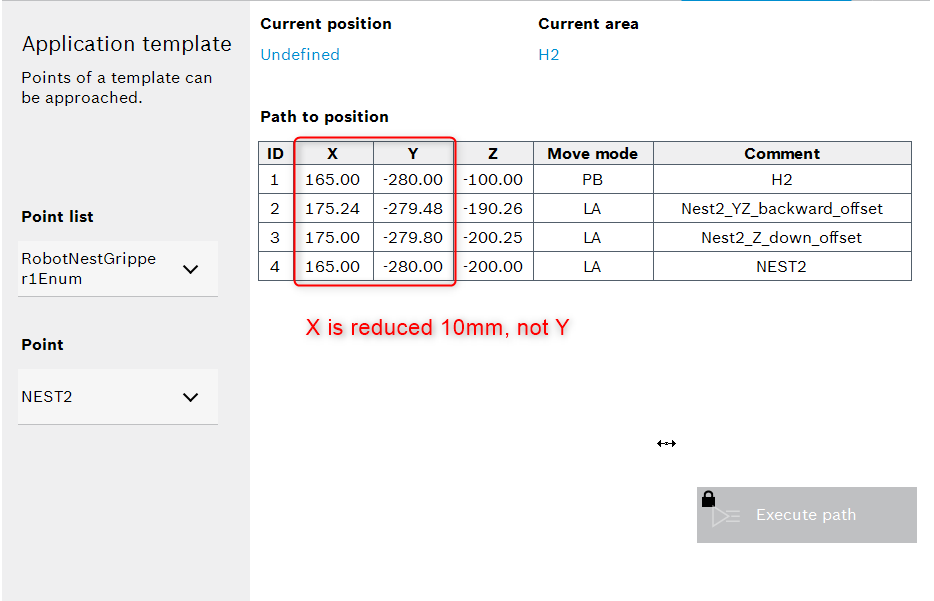
I tried to use offset fucntion during route plan, but the actual result is that X coordinate is exchanged to Y coodinate, I do not understand where I made a mistake, please see attachments, thank you
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-22-2023 02:41 PM
Hello Hudson,
the method AddOffsetRobotPointToList is allways related to the tool (view off tool). For example a offset of Z = -100 moves the robottool "up", if the tool ist facing to the ground (see screenshot below). This is described in the documntation.

{kind=link}
{kind=link}
If this dosn't answer your question, please tell us the values of your tool.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-01-2023 03:04 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-01-2023 07:41 AM - edited 09-04-2023 07:51 AM
The tool configuration looks okay and also your code examples...
Did you use a special coordinate system for your pointlists or did you use the RCS (robot coordinate system) ?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-27-2023 09:58 AM - edited 09-29-2023 02:20 AM
I used the RCS (robot coordinate system), I got your points, 'view of tool', thank you
Still looking for something?
- Top Results