Developer Portal Community
- Top Results
- Community
- Nexeed Automation
- Technology packs and Assist functions
- Integrated robotics - slow moving through joint blended points
We are still working on migrating to the new Bosch Connected Industry Online Portal. Stay tuned! Click here for the latest updates.
Integrated robotics - slow moving through joint blended points
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Integrated robotics - slow moving through joint blended points
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-25-2022 11:34 AM
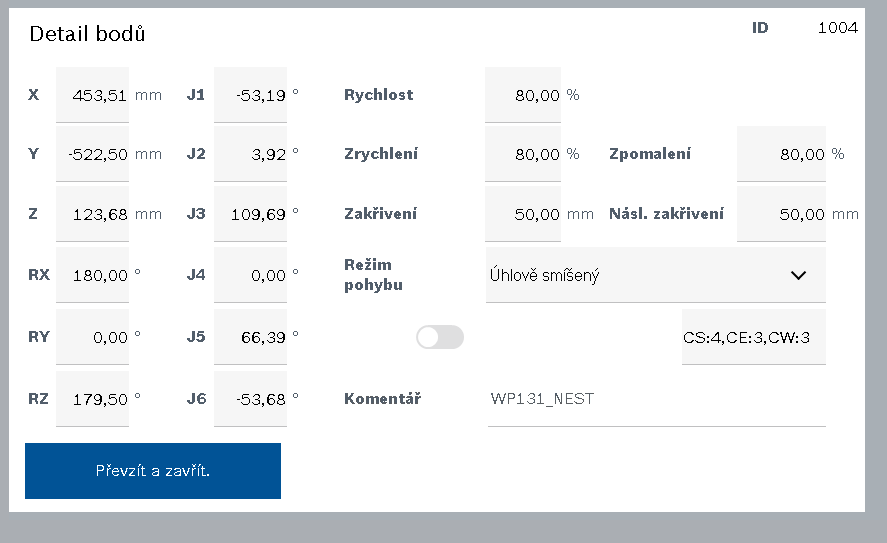
The robot slows down significantly when passing help points. All my help points are set as blended joints, blending 50 mm post blending 50 mm (see screen). I tried changing the settings to PTP blended, but the result was the same. I discuss this with Stäubli. I sent them video trajectories, record and screenshots of setings of the points. It got through to the uniVal developers and they wondered if the correct function blocks,MC_MoveAxisAbsolute, Direct and Linear were being used and on follow up if they were waiting for the MC_GroupContinue statuses which should be the correct function block to use.
Thank you in advance for reply.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-24-2022 09:12 AM
Modified version: point names ending in _H are help points, points ending in _OFFSET are offsets of the corresponding points, offsets are only from nest positions.
Trajectories from line 353.
We find that the traversal of points WP137_NEST_H, WP138_NEST_H, WP132_NEST_H, WP131_NEST_H, WP134_NEST_H, WP135_NEST_H, WP136_NEST_H, is not smooth.
Thank you in advance
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-27-2022 08:21 AM
What I have already noticed is, that the motion parameter for the help points are only configured with 80% speed,
in comperation to the nest points with 100% speed.
But that would probably be too easy, as if that had already been the problem.
So we will investigate it a little bit more in detail to see if we notice anything else.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-27-2022 05:35 PM
I know about the reduced speed of course, the problem is not in the whole movement, but only when passing through the blending and post blending areas.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-28-2022 06:54 AM
Would it be possible for you to make a video of the process so that we can better imagine what is happening?
And have you tried if it gets better/worse when you reduce/increase the blending distances ?
In unfavourable situations, the "slowest" axis determines the maximum possible speed.
This happens either when an axis is close to the axis limit or often when the robot has to change its configuration to reach a point.
In your log file the configuration change happens for example between the points : WP103_LOAD_H and HOME_H ,
but without seeing the sequence it is difficult to judge whether this is really a problem in the situation...
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-29-2022 02:51 PM
Still looking for something?
- Top Results