Developer Portal Community
- Top Results
- Community
- Nexeed Automation
- Technology packs and Assist functions
- Integrated robotics - slow moving through joint blended points
We are still working on migrating to the new Bosch Connected Industry Online Portal. Stay tuned! Click here for the latest updates.
Integrated robotics - slow moving through joint blended points
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Integrated robotics - slow moving through joint blended points
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-25-2022 11:34 AM
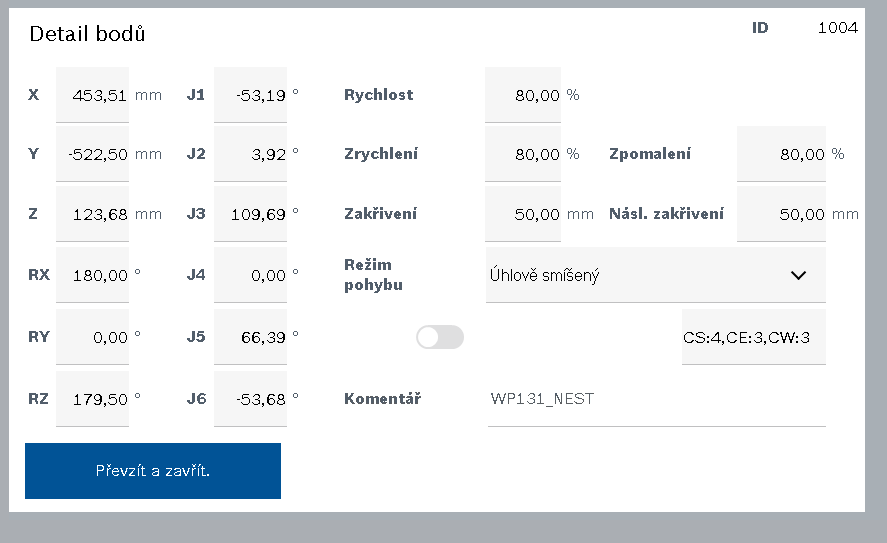
The robot slows down significantly when passing help points. All my help points are set as blended joints, blending 50 mm post blending 50 mm (see screen). I tried changing the settings to PTP blended, but the result was the same. I discuss this with Stäubli. I sent them video trajectories, record and screenshots of setings of the points. It got through to the uniVal developers and they wondered if the correct function blocks,MC_MoveAxisAbsolute, Direct and Linear were being used and on follow up if they were waiting for the MC_GroupContinue statuses which should be the correct function block to use.
Thank you in advance for reply.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-25-2022 03:32 PM
Can you enable the logging (debug level) in the HMI start screen of the programmable robot object
and send us the log file of your motion sequence ?
The log file is located in the same directory, which you have chosen for your robot configuration and teachpoints...
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-26-2022 02:34 PM
I will turn on logging as soon as the machine is at the customer's site. Unfortunately, machine is prepared for transport now (it is disconected). Thank you for your response. The machine will be ready to be switched on again at the customer's place on 14.6.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-13-2022 02:28 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-20-2022 01:59 PM - edited 06-20-2022 02:01 PM
Thanks for the logfile .
Would it be possible, that you correct the point-comments,
if you calculate or manipulate points based on other points ?
Unfortunately its not clear to see, what is a help-position and what is a nest-position.
For example: if you use the "WP135_NEST " point to calculate a offset position,
than change the comment of this calculated point to "WP135_NEST_OFFSET" ,
so it is more clear for us to understand what is the sequence.
It would be great if you could give us a specific teaching point where this problem occurs?
and then it would be interesting to know which robot-type it is.
Still looking for something?
- Top Results