Developer Portal Community
- Top Results
- Community
- Nexeed Automation
- Technology packs and Assist functions
- Re: AddOffsetRobotPointToList
We are still working on migrating to the new Bosch Connected Industry Online Portal. Stay tuned! Click here for the latest updates.
AddOffsetRobotPointToList
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-08-2024 07:54 AM
Hello,
I do not understand the AddOffsetRobotPointToList using method, my application is that I want to calculate a new robot point based on a reference point for replacing the picking point, because product picking position is different.
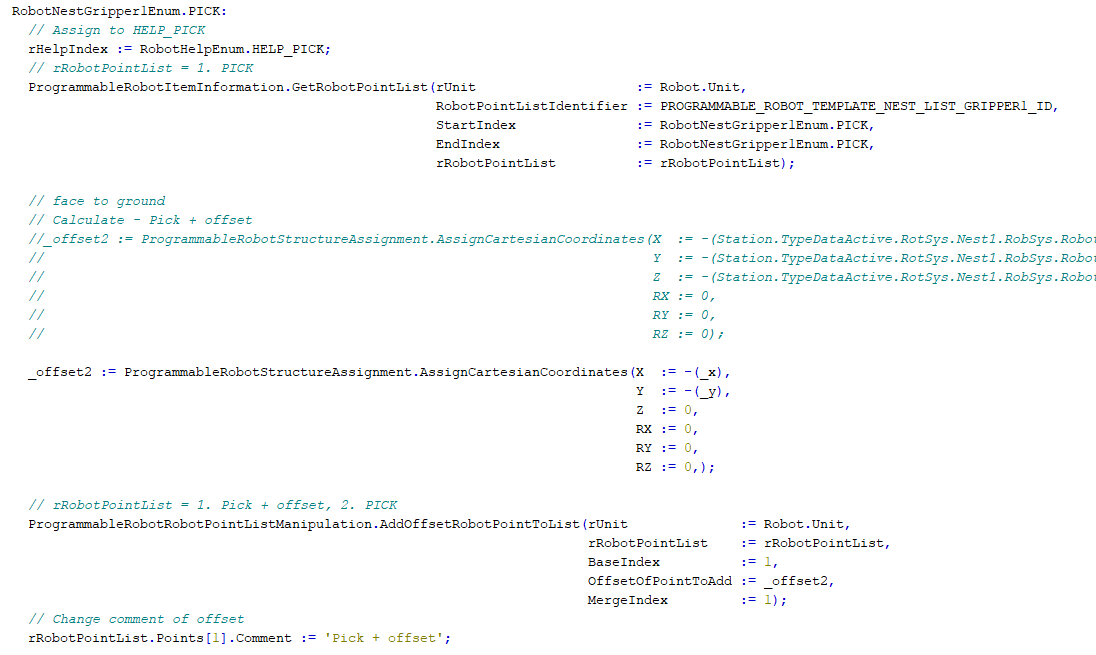
for example: reference point(see attachment 'Picking_Position_value') the X = 78.78, Y = 341.3. I want to calculate it to X = 138.78, Y = 341.3 via AddOffsetRobotPointToList method, but the result is not what I expect. (see attachment Pincking_Position_value_after_adding_offset and PLC_Code).
I refered to the document, but do not understand what the 'the robot point addressed by BaseIndex is considered the origin of a new reference coordinate system' meaning.
Hardware : Staubli scara 4 axis
thank you.
Solved! Go to Solution.
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-10-2024 12:15 PM
The AddOffsetRobotPointToList method adds a "Tool-Offset" to the point - that means that the offset is added in the alignment of the tool,
not in the RCS (Robot coordinate system) . Was the point teached with a tool ? And if yes - what does your tool look like ?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-11-2024 03:23 AM - edited 10-11-2024 03:30 AM
Yes, I selected a tool during teaching robot point, but I set all data(x,y,z,rx,ry,rz) to 0. the tool is a cylinder gripper and I see there is a angle(not 90 or 180) between X flange direction and the gripper clamping direction. so I guess if the method work with flange coordinate, not RCS.
Actually, I do not understand what the 'the offset is added in the alignment of the tool' meaning, if it is caculated based on the flange coordinate like the attachment?
the gripper center is not match with flange center.
thank you.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-11-2024 11:45 AM - edited 10-11-2024 12:00 PM
If you have set all values of the tool to 0, then your tool is equal to the flange.
With stäubli robots, it is common to set up the tool so that the working direction of the tool is the the Z axis.
Then you usually just work with a Z-offset to approach to a workpiece or moving away from it.
I made a short video of how the whole thing behaves.
The blue arrow is the Z-axis - once from the flange and once from a correct configured tool....
If I select the tool and drive in Z-direction, then you can see that the tool moves only in Z-direction,
but the robot has to interpolate all axes accordingly.
You would have to tilt your tool 90 degrees and compensate the twist to the flange
and adjust the center of the gripper via X and Y.
Then you can easily work with tool offsets in your program.
Without a correctly configured tool you can not work with the tooloffsets - the result will not be satisfactory.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-14-2024 03:24 AM
thank you^^
Still looking for something?
- Top Results